:quality(80)/p7i.vogel.de/wcms/6d/76/6d76231f20b0bb7beed2872f6636594f/0130120514v2.jpeg "Bild 1: Tiefpassfilter 2. Ordnung zur Glättung einer mittels Timer erzeugten PWM, links passiv, rechts aktiv. (Bild: Hochschule Mannheim)")
:quality(80)/p7i.vogel.de/wcms/c8/1e/c81efe8237fc680c7c14d23751a2c5ee/0127863835v2.jpeg "Bild 1:
Frequenzgang eines Dezimationsfilters bei 500 MSample/s und Fin = 70 MHz bei einem Dezimationsfaktor von 2. (Bild: TI)")
:quality(80)/p7i.vogel.de/wcms/7a/6a/7a6af3717955b269cf655b9fda07890b/0118745025v2.jpeg "Elektromagnetische Verträglichkeit:
Der EMV von Geräten und Produkten kommt ein immer höherer Stellenwert zu. (Bild: Michael J. Müller / Würth Elektronik)")
:quality(80)/p7i.vogel.de/wcms/b6/f8/b6f824e303b426aee0ffc6335f707997/0119443352v2.jpeg "Elektromagnetische Verträglichkeit: Die EMV von Geräten und Produkten nimmt einen immer höheren Stellenwert ein. Tipps zum EMV-konformen Design. (Bild: Michael J. Müller)")
:quality(80)/p7i.vogel.de/wcms/86/2a/862afb1de8423bb7401098a2fd268281/0131792672v2.jpeg "Bild 1: Ein Spannungsversorgungskonzept für Lasten, welche eine vorgegebene Ein- und Abschaltreihenfolge (Sequencing) benötigen. (Bild: ADI)")
:quality(80)/p7i.vogel.de/wcms/7f/c5/7fc584ed445088b6472b57cf8ce223f9/0128106511v2.jpeg "Bild 3: OPV-Modell mit Pinbelegung und Beschreibungen. (Bild: ADI)")
:quality(80)/p7i.vogel.de/wcms/1d/18/1d1807aec6b9e7153e108d66f5dd2aff/0127093609v2.jpeg "Bild 1:
Ein Beispiel für die Einrichtung eines A²B-Netzwerks und die angeschlossenen Blöcke. (Bild: ADI)")
:quality(80)/p7i.vogel.de/wcms/56/f0/56f0dee1fa1d5a0045c4258b40bd1193/0126767105v2.jpeg "Hall-Effekt-Schalter: Durchbruch bei der Empfindlichkeit von magnetorestriktiven Sensoren. (Bild: TI)")
:quality(80)/p7i.vogel.de/wcms/71/d6/71d6f4aa2d0e4112ab718df71c5ccfb1/0125010024v2.jpeg "Bild 1: Mithilfe von Q4 kann die Batterie von der Anwendung getrennt werden. (Bild: TI)")
:quality(80)/p7i.vogel.de/wcms/fd/75/fd754b0998f6e30d975c8a441c34eb03/0124489399v2.jpeg "Künstliche Intelligenz: Sowohl geschätzt, als auch gefürchtet. (Bild: Gerd Altmann)")
:quality(80)/p7i.vogel.de/wcms/e0/96/e096cd446f05afbaa0ad6ded16715528/0112587312.jpeg "Bild 1: Prinzip der Gleichspannungsisolation aus Sicherheitsgründen. (Bild: ADI)")
:quality(80)/p7i.vogel.de/wcms/aa/9f/aa9f478067633d609deb87ca1c14467e/69238554.jpeg "Bild 2:
Aufbau eines galvanisch nicht isolierten DC/DC-ATX- Wandlers. (Bild: Magic Power)")
:quality(80)/images.vogel.de/vogelonline/bdb/1690700/1690795/original.jpg "Mit Halbleiterschaltern lässt sich der Ein-und Ausschaltvorgang sogar bei Gleichspannungen und Gleichströmen einfacher steuern. Das Ziel ist hier die Vermeidung von Einschalt-Stromstößen, die neue Probleme erzeugen. Doch der eigentliche Nutzen ist die zuverlässige Funktion über eine lange Lebensdauer. (Infineon)")
:quality(80)/p7i.vogel.de/wcms/64/45/64452e8f6684f8c2fb5b4c28978c18e5/0123247120v2.jpeg "Bild 1:
Eine Versorgungsspannungsarchitektur erstellt mit
LTpowerPlanner. (Bild: ADI)")
:quality(80)/p7i.vogel.de/wcms/13/2b/132b287c3a48412cb8cbc6a058309254/94255924.jpeg "Raspberry Pi Pico: Für virtuelle Projekte reicht der Online-Simulator Wokwi. (Bild: Raspberry Pi)")
:quality(80)/images.vogel.de/vogelonline/bdb/1745700/1745790/original.jpg "Schaltungssimulator: PSpice für TI hilft Entwicklern durch Schaltungssimulation und -verifikation auf Systemebene, kürzere Markteinführungszeiten zu erzielen. (TI)")
:quality(80)/p7i.vogel.de/wcms/76/52/76524f60d1ceceec257c91be898abec4/87998596.jpeg "(Bild: RS Components)")
:quality(80)/p7i.vogel.de/wcms/5c/bb/5cbbd9e4df4baa5929886613b19e35bd/0126651291v2.jpeg "Durchbruch bei Highspeed-DACs: Der neue D/A-Wandler von imec kombiniert hohe Geschwindigkeit und Energieeffizienz. (Bild: imec)")
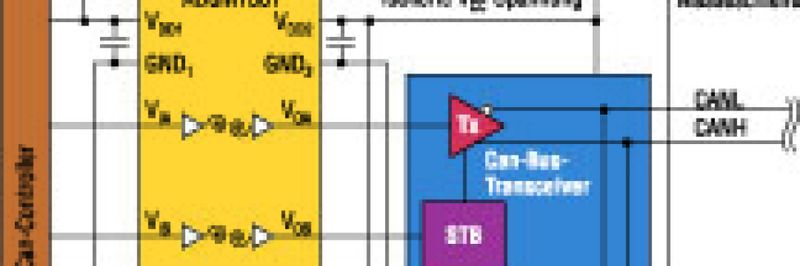
Schaltung Digitale Isolation schützt CAN-Bus-Systeme
In Anwendungen wie Prozesssteuerungen, regelbaren Stromversorgungen und Punkt-zu-Punkt-Kommunikationssystemen übertragen serielle Busse Daten über physikalische Netzwerke wie RS232, RS485 und CAN. Da die Systeme oft über weite Entfernungen zusammenarbeiten, ist eine galvanische Isolation erforderlich, um Masseschleifen zu vermeiden und die Systeme vor hohen Spannungstransienten zu schützen. Außerdem lassen sich mithilfe der galvanischen Trennung Signalverzerrungen reduzieren und die physikalische Sicherheit gewährleisten.
Der CAN-Bus, ursprünglich für Automotive-Anwendungen entwickelt, spezifiziert ein serielles Protokoll zum Übertragen von Daten über zwei Leitungen mit Datenraten von bis zu 1 MBit/s. Er ist für bis zu 30 Schaltungsknoten (Nodes) ausgelegt und kann Entfernungen von max. 10 m überbrücken. Beim CAN-Bus sind sowohl physikalische wie auch Data-Link-Layer definiert. Asynchrone Daten werden beim CAN-Bus in Frames übertragen. Diese bestehen aus Start- und Stopp-Bits sowie aus Arbitrations-, Control-, CRC- (Cyclic Redundancy Check) und Acknowledge-Feldern.
Jeder Schaltungsknoten am CAN-Bus kann zugleich Daten empfangen und übertragen. Eine der wichtigsten Eigenschaften des Protokolls ist somit die sog. „Nondestructive“-Bit-Arbitration, die sicherstellt, dass keine Daten verloren gehen.
Zum Beginn jeder Nachricht überträgt jeder Schaltungsknoten ein SOM-Bit (Start of Message). Die anderen Schaltungsknoten „sehen“ diese Aktivität und warten mit der Übertragung so lange, bis die Nachricht vollständig ist. Anschließend wird das 11- oder 29-Bit-Arbitration-Feld übertragen. Dieses Feld priorisiert die Nachrichten, die über den Bus geschickt werden. Der Schaltungsknoten mit der höchsten Priorität übernimmt stets die Steuerung des Busses und veranlasst, dass Nodes mit niedrigerer Priorität warten müssen. Dadurch werden die Nachrichten, die die höchste Priorität haben, stets übertragen.
Der CAN-Bus arbeitet mit einem „Balanced“-2-Wire-Differenz-Interface. NRZ-Encoding (Non-Return-to-Zero) wird verwendet, um kompakte Nachrichten mit einer minimalen Anzahl an Übergängen (Transitions) und hoher Rauschimmunität sicherzustellen. CAN-Bus-Transceiver nutzen ein Bauteilpaar mit offener Drain, um ein Differenzsignal aus CANH (VCC bis 0,9 V) und CANL (1,5 V) zu erzeugen.
Bei der Ansteuerung des Transmitters erzeugt dieser das dominante Signal, eine logische „Null“. Falls kein Transmitter angesteuert wird, setzen Pull-up-Widerstände den Bus auf VCC/2. Dies erzeugt das rezessive Signal, eine logische „Eins“. Über ein Standby-Control-Signal gelangt der Transceiver in einen Low-Power-Mode. Ein Low-Power-Empfänger bleibt während des Standbybetriebs aktiv und überwacht, ob auf dem Bus Zustandsänderungen auftreten. Außerdem teilt er dem Controller mit, wenn bei einer vorhandenen Aktivität der lokale Schaltungsknoten aktiviert werden soll.
Digitale Isolatoren, die mit Standard-Logikpegeln von 3 oder 5 V arbeiten, werden zwischen Transceiver und lokalem CAN-Controller eingesetzt. Die Ein- und Ausgangsschaltkreise der Isolatoren sind elektrisch voneinander getrennt. Mit einem Isolator, der sich zwischen CAN-Controller und Transceiver befindet, lässt sich somit das System von den Leitungen isolieren. Um die Isolation zu vervollständigen, wird ein isolierter DC/DC-Wandler verwendet, der Isolatoren und Transceiver versorgt. Die Kombination aus digitalen Isolatoren und einer isolierten Stromversorgung eliminiert Masseschleifen und schützt das System effizient vor Beschädigungen durch Überspannungen.
Der Autor: Scott Wayne arbeitet bei Analog Devices.
:quality(80)/p7i.vogel.de/wcms/1d/18/1d1807aec6b9e7153e108d66f5dd2aff/0127093609v2.jpeg "Bild 1:
Ein Beispiel für die Einrichtung eines A²B-Netzwerks und die angeschlossenen Blöcke. (Bild: ADI)")
:quality(80)/p7i.vogel.de/wcms/5c/bb/5cbbd9e4df4baa5929886613b19e35bd/0126651291v2.jpeg "Durchbruch bei Highspeed-DACs: Der neue D/A-Wandler von imec kombiniert hohe Geschwindigkeit und Energieeffizienz. (Bild: imec)")